A día de hoy el gasto en herbicidas en Europa supone el 40% del desembolso monetario total en agroquímicos. Cabe preguntarse si ésta es una condición inevitable o existe un margen de mejora en la eficiencia en el uso de recursos, y en tal caso a qué precio.
Pilar Barreiro. Catedrática de Ingeniería Agroforestal. ETSI Agrónomos. UPM.
El grupo de investigación de César Quintanilla en el Instituto de Ciencias Medio Ambientales ha publicado recientemente un estudio (Andújar et al., 2013) en el que analiza la reticencia de los agricultores al empleo de un manejo diferencial de los tratamientos herbicidas. De acuerdo con este estudio, una infestación inferior al 7% no justifica ningún tipo de tratamiento, mientras que una infestación del 40% puede ser abordada de manera generalizada, es decir, mediante un tratamiento convencional.

Distribución irregular de malas hierbas en un campo de maíz.
Es en el rango de infestación intermedio (7-40%) donde aparece la duda, y este estudio se decanta por recomendar la tecnología de cartografía y control sitio específico en aquellos casos en que el nivel de infestación se sitúe entre un 7 y un 20%. El equipo de investigación ha realizado a su vez un muestreo para determinar qué proporción de parcelas se encuentran en esta situación, resultando dicha proporción de un 22%.
Para los niveles de infestación entre el 30 y 40%, el método más eficaz será el empleo de un tratamiento localizado barriendo toda la superficie, empleando para ello algún sistema de percepción o diagnóstico local: sistema de visión en tiempo real, weedseeker.
En la medida en que los reglamentos medioambientales se impongan, rentabilizándose el uso de la tecnología, parece claro que este nicho de mercado será colonizado por empresas de servicios especializadas.
Cartografía temprana de malas hierbas
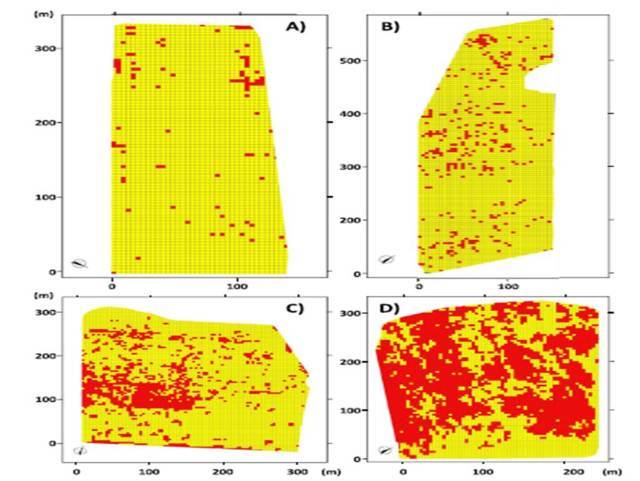
Figura 1. Mapa de tratamiento con herbicidas para campos con un 3, 8, 20 y 60% de infestación (Andújar y col., 2013).
Éste es el tema de investigación del grupo de investigación de Francisca López-Granados en el Instituto de Agricultura Sostenible de Córdoba (Torres Sánchez et al., 2013; Peña et al., 2013; Torres Sánchez et al., 2014), ya que un control eficiente de malas hierbas se basa en un diagnóstico en las primeras fases del cultivo (de 2 a 6 hojas verdaderas, figura 1).
Esto exige una elevada resolución de imágenes que puede alcanzarse con distintos dispositivos. Las cámaras RGB convencionales están perfectamente preparadas para ello. Por ejemplo una cámara de 12 Mpixels con una óptica de 50 mm ofrece a 30 m de altura una resolución de 1,1 cm y de 3,8 cm a 100 m. Si optamos, en cambio, por una mayor información espectral (más longitudes de onda) empleando una cámara del tipo mini-MCA (Tetracam INC) podemos esperar una resolución de 1,6 cm a 30 m y de 5,4 cm a 100 m de altura de vuelo (figura 2).
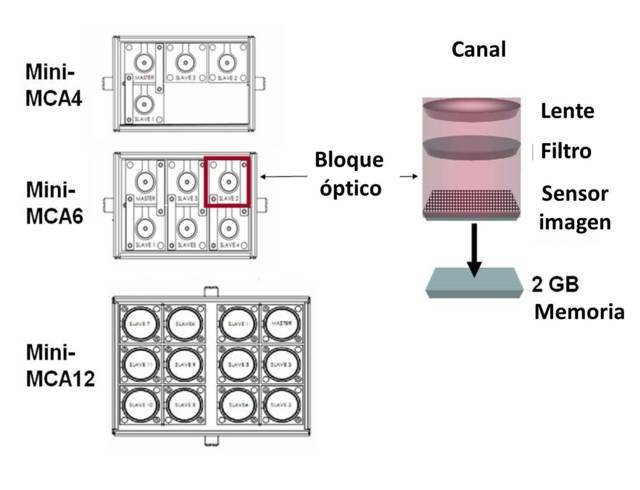
Figura 2. Tres modelos de cámaras multiespectrales ofertados por Tetracam.
Disponer de una mayor información espectral nos ayuda a mejorar la discriminación del cultivo y de las malas hierbas, si se realiza adecuadamente el proceso de alineación. El índice espectral más conocido es el NDVI (Índice de Vegetación Normalizado, según sus siglas en inglés) que emplea una combinación de bandas roja (679 y 700 nm) e infrarroja (740 y 780 nm), pero estudios incluso anteriores al año 2000 ya auguraban que la combinación de bandas espectrales permitiría la identificación de malas hierbas incluso a nivel de especie. Por ejemplo, la combinación de 1.200 nm y 840 nm permitiría distinguir entre especies del género Brassica (Barreiro et al., 1998).
Este conocimiento puede ser de gran utilizada ahora que se está generalizando el cultivo de la colza que puede convertirse en una vegetación adventicia difícil de tratar en las rotaciones de cultivo, y sometido a que los detectores InGaAs se popularicen.
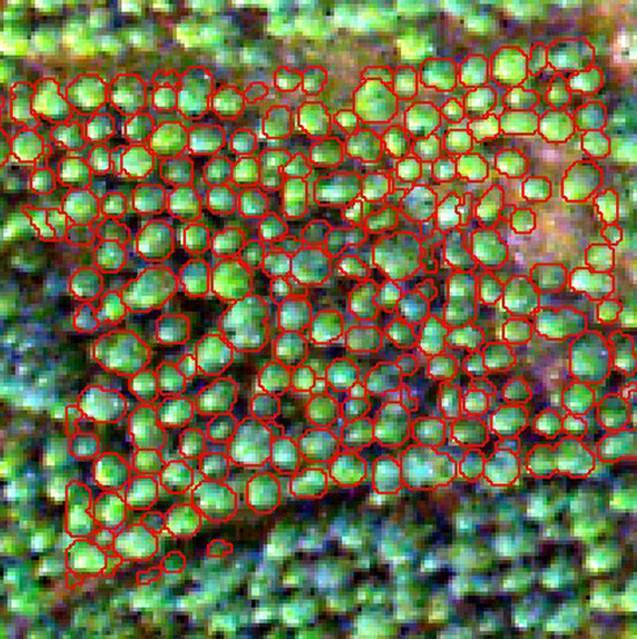
Figura 3. Identificación automatizada de objetos con el software e-cognition de Trimble.
Una vez que se han adquirido las imágenes, el proceso de tratamiento debe estar automatizado. Para ello el equipo de investigación de López-Granados en Córdoba (Peña et al., 2014) propone un procedimiento que combina el uso del software comercial eCognition (Trimble) con un conjunto de rutinas de segmentación de desarrollo propias, basadas en el análisis de objetos en función de sus propiedades espectrales, morfológicas y contextuales.
El procedimiento (figura 3) puede resumirse como sigue: identificación de las líneas de cultivo basada en la aglutinación de objetos con una dirección de elongación de los objetos frecuente y con NDVI > 0,2, discriminación de malas hierbas basándose en su posición relativa y elaboración de un mapa de tratamiento. El procedimiento se ha evaluado con una verificación a nivel de terreno determinándose una capacidad predictiva del 90% a nivel cuantitativo (predicción del porcentaje de infestación), una exactitud del 86% al clasificar en tres grupos (<5%, 5-20% y >20%).
Rodales: dispersión en falange o guerrilla
Es un criterio simplista considerar que conocer el nivel medio de infestación superficial es suficiente para determinar completamente nuestras decisiones en relación a los tratamientos herbicidas, entre otras cosas porque la distribución espacial de las malas hierbas no es uniforme debido a las diferencias existentes en el sistema de reproducción (sexual o vegetativo), al agente de dispersión (aire, animales, maquinaria) y al nivel de persistencia de los propágulos (Fernández Quintanilla et al., 2011; Castellanos-Frias et al., 2012).

Figura 4. Localización diferencial de las malas hierbas en función de la topografía del terreno (Dorado y cols, 2014).
Además, las especies tienen preferencias ambientales para su persistencia tales como la orientación (norte o sur), o la colonización de vaguadas o fondos planos. Todo ello da lugar a una acumulación localizada de especies infestantes, que denominamos rodales, que en general es persistente en el tiempo con avances lentos en los bordes del rodal, denominada dispersión en falange, y aparición de nuevos focos, denominada dispersión en guerrilla.
Además, conocer las especies implicadas en la infestación es muy relevante para realizar un diseño adecuado de los tratamientos. Como mínimo resulta fundamental establecer una clasificación de los rodales en monocotiledóneas y dicotiledóneas en los primeros estados de desarrollo incorporando para ello los algoritmos de identificación en los sistemas de cartografía (Herrera et al., 2014) (figura 4).
Definición de rutas en los vehículos aéreos
Los drones son vehículos no tripulados (UAVs) con capacidad de vuelo estacionario y omnidireccional. La optimización de las rutas en drones es el ámbito de especialidad del equipo de investigación de Antonio Barrientos (ETSII, UPM) que ha publicado dos ilustrativos artículos al respecto (Sanz-Muñoz et al., 2011; Valente et al., 2013).

Detalle de cámara Tetracam mini-MCA con seis filtros para la obtención de imágenes multiespectrales.

Montaje de la cámara sobre un dron
Según éstos, los algoritmos de planeamiento de la trayectoria deben clasificarse en función del tipo de ejecución: 1) diferidos (off-line), y 2) en línea (on-line). Los segundos son fundamentalmente reactivos, muy flexibles y robustos, pero exigen la incorporación a bordo de sensores, para reaccionar respecto al entorno, y una mayor capacidad de cálculo (mayor peso y consumo energético) aspecto vital a día de hoy. Los sistemas en diferido u off-line no son capaces de reaccionar ante cambios del entorno, pero permiten establecer planes muy eficientes, maximizando la relación entre el recorrido y el área barrida.
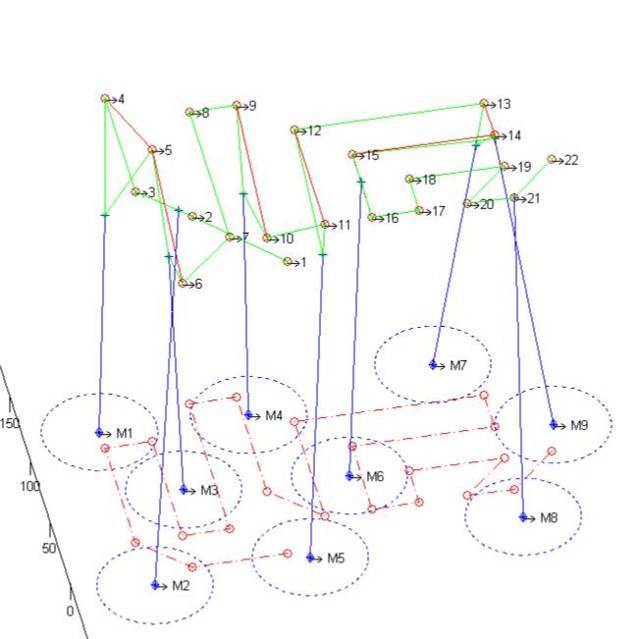
Figura 5. Definición de rutas bi-objetivo: barrido óptimo y lectura de datos de una red de sensores inalámbricos (WSN). Grupo de investigación de Antonio Barrientos, UPM.
La planificación de la trayectoria se denomina genéricamente CPP (Planificación de la Ruta de Cobertura, según sus siglas en inglés) y consiste en dividir el área de trabajo en una cuadrícula rectangular, donde cada celdilla representa un paralelepípedo, y su centro geométrico es un punto de paso; cada retícula corresponde también a una imagen. La ruta de cubrimiento se calcula estableciendo las siguientes restricciones: no pasar más de dos veces por el mismo punto de paso, respetar los puntos de partida y llegada, y realizar la trayectoria con el mínimo número de cambios de dirección posibles.
Un aspecto interesante es que los UAVs pueden emplearse simultáneamente para recoger datos de redes de sensores inalámbricos (WSN), además de imágenes de tierra. En este caso, al algoritmo anterior se le añade una nueva capa de abstracción que establece un número de puntos objetivos desde los que es posible una descarga óptima de datos. Las restricciones a las que son sometidos los puntos de descarga pueden resumirse en:
- Estar contenidos dentro de una esfera con centro en el módulo de transmisión de tierra (que aglutina datos de un clúster de sensores) y con radio el alcance de comunicaciones.
- La desviación máxima en distancia permitida respecto a la ruta original. La figura 5 muestra un ejemplo de optimización de ruta: en rojo la ruta original, y en verde la ruta modificada incluyendo los puntos de descarga. Las pruebas realizadas por los autores indican que el incremento de uno a dos objetivos de la misión puede alcanzarse con un incremento de trayectoria inferior al 2%.
Cuando se emplean varios drones simultáneamente en la cartografía, el primer paso consiste en descomponer el área para asignarla a cada una de las unidades, y posteriormente optimizar el camino a recorrer por cada unidad. O bien abordar el problema a gran escala (buceando entre un elevado número de soluciones posibles).
En este caso puede abordarse con procedimientos numéricos meta-heurísticos, como por ejemplo los algoritmos genéticos (que simulan la recombinación de la información y la supervivencia del más apto), u otros tan curiosos como simular el proceso de improvisación en el jazz en la búsqueda de una composición armónica (en este caso corta y con pocos giros). Este último es el caso del trabajo del grupo de Antonio Barrientos en 2013, donde se alcanzan tiempos de computación inferiores a 15 s.
Sistemas de diagnóstico en tierra en tiempo real
El diseño y puesta a punto de un sistema de visión para la detección de malas hierbas en tiempo real que no emplee iluminación activa no es trivial, pues las condiciones de iluminación natural son muy variables, así como las especies de malas hierbas y los estados vegetativos del cultivo.
En el proyecto RHEA el sistema de visión para cultivos de líneas amplias (por ejemplo, maíz) ha sido desarrollado por el Centro de Automática y Robótica en colaboración con el departamento de Ingeniería del Software de la Universidad Complutense (Burgos-Artizzu et al., 2011). Para ello han empleado una base de datos de 16 h de grabación (1,4 millones de imágenes) registradas a bordo de tractores a una velocidad media de 7 km/h, a lo largo de varios años y en condiciones de gran variabilidad con cámaras de video convencionales.

Demostración final del proyecto RHEA, coordinado por Pablo González de Santos (CSIC).
El sistema de análisis de imagen consta de dos grandes procedimientos: uno denominado lento (0,3 s) y otro rápido (0,04 s). El primero obedece a las siglas RCRD (Detección Robusta de Líneas, según sus siglas en inglés) y se caracteriza por recoger casi una decena de imágenes (las que se registran en los 0,3 s anteriores), estableciendo una segmentación de la vegetación combinando los canales RGB con coeficientes individualizados (r=-0,884; g=1,262; b=-0,311) optimizados por medio de algoritmos genéticos.
Una vez compuestas las imágenes de vegetación, segmentadas de forma individualizada (mediante el criterio de la intensidad media), se componen con una operación lógica AND de manera que los píxeles que en varias imágenes sucesivas están clasificado como vegetación se ven reforzados con el resultado final de una identificación robusta de las líneas de cultivo, una vez aplicado un filtro morfológico de apertura.
El procedimiento rápido (0,04 s) se denomina FIP (Procesado Rápido, según sus siglas en inglés), analiza sólo el área inmediatamente cercana al frontal del tractor y coteja sus resultados de segmentación con el procedimiento anterior, considerando mala hierba todo aquello que queda fuera de la línea de cultivo.
Los resultados indican que el sistema propuesto en RHEA para cultivos en líneas identifica el 95% de las malas hierbas con un 1% de falsos negativos (malas hierbas no detectadas).
Dispositivos de control: químico vs. térmico/mecánico
Para el control químico de malas hierbas en cereales de invierno (por ejemplo, trigo), en el proyecto RHEA se ha desarrollado un sistema de concentración variable (Pérez-Ruiz et al., 2015, Universidad de Sevilla y de Córdoba) que emplea un tanque de agua de 200 l y otro de herbicida de 15 l, así como un sistema de inyección variable que permite gestionar la concentración de herbicida a la demanda, y un sistema de inyección central que determina el consumo de agua.
En este tipo de equipos resulta fundamental aquilatar el tiempo de tránsito del herbicida desde el punto de inyección a cada una de las boquillas para que el control sea efectivo. La principal ventaja de este concepto es que no quedan restos de caldo pues el herbicida puede ser recuperado de su depósito y almacenado.

Demostración del equiop con tratamiento térmico contra las malas hierbas. Proyecto RHEA.
Los ensayos de campo con el sistema de control variable de concentración indican una elevada precisión derivada entre otras cosas del sistema de guiado (RTK) y del empleo de la cartografía aérea con drones. Finalmente destacar el enorme incremento de la autonomía de trabajo (hectáreas, hasta repostar herbicida o agua) derivada de la reducción del líquido distribuido que alcanza el 90% con infestaciones del 10%.
En el proyecto RHEA, la Universidad de Pisa (Pérez-Ruiz et al, 2015) ha evaluado en cultivos en líneas (por ejemplo, maíz), el empleo de un dispositivo térmico (cuatro unidades) y mecánico (cinco elementos). Cada dispositivo térmico consta de un tratamiento de llama con LPG (gas licuado del petróleo) montado sobre un paralelogramo articulado. Los elementos mecánicos trabajan en la entre-línea mientras que los térmicos actúan dentro de las líneas de cultivo guiados por el sistema de visión en tiempo real.
El manejo del LPG es complejo y exige disponer de las bombonas en un baño de agua atemperado con los gases de escape del vehículo. Este procedimiento permite un control de las malas hierbas entre un 95 y 99%. Se constatan ligeros daños al maíz que se recuperan en el plazo de diez días, sin impacto en la productividad final. El coste atribuido a un tratamiento con un nivel de infestación superior al 25% en el 17% del área y del 5-25% en el 32 % de la superficie es de 24 euros/ha (9,8 kg/ha).
Dosificación variable en cultivos arbóreos

Figura 6. Equipo robotizado de tratamientos en cultivos arbóreos, dotado de varios sensores de ultrasonidos qeu controlan la aplicación.
El equipo automatizado para la aplicación de tratamientos fitosanitarios en cultivos arbóreos desarrollado en el proyecto RHEA (Pérez-Ruiz et al, 2015) en la Universidad de Florencia, parte de un modelo Oktopus (Nobili Inc.) con un tanque de 300 l de capacidad y un ventilador centrífugo que requiere 15 kW a la toma de fuerza.
Las boquillas de pulverización se distribuyen en bloques de cuatro a cada lado del equipo y son orientadas de forma automatizada con ángulos de giro de 0 a 30º. El caudal instantáneo es regulado para cada boquilla de forma independiente mediante sendas válvulas solenoides (VE146V Parker) en función de la señal de sensores de ultrasonidos (U-GAGE T30) distribuidos en altura. El flujo de aire es controlado con ocho válvulas de mariposa localizadas en el extremo de cada uno de los conductos de salida; los diversos automatismos son controlados mediante un PLC (figura 6).
Los ensayos de campo con el sistema indican que con niveles de densidad foliar bajos, la reflexión de la señal de ultrasonidos no responde de la manera esperada, registrándose un retardo en su respuesta. Este problema se elimina cuando se emplean tiempos de refresco en los sensores de 200 ms, aunque en este caso se incrementa el riesgo de interferencia entre ellos, por lo que se emplea un ladeo de 5º.

Figura 7. Ejemplo de simulación arbórea para definir mapas de tratamientos diferenciales (Garrido Izard, 2014).
El control automatizado del tratamiento es efectivo con una resolución a lo largo de la línea de cultivo de 10 cm y un tiempo de respuesta de 100 ms.
En el proyecto RHEA también se ha evaluado la sustitución del sistema de ultrasonidos por un láser SICK de barrido (Garrido-Izard et al., 2014) obteniéndose una reproducción tridimensional completa de las copas, aunque a un mayor coste (figura 7).
Criterios de seguridad en vehículos autónomos
El proyecto RHEA comenzó realizando un estudio de las especificaciones de seguridad que debían cubrir las unidades robotizadas de tierra (GMU, Garrido-Izard et al., 2013), aunque el Centro de Automática y Robótica (Gonzalez-de-Santos et al., 2012) ha sido el encargado de desarrollar el sistema de supervisión de las GMU (Unidades Móviles de Tierra, según sus siglas en inglés).
 El sistema analiza toda la información proporcionada por los sensores y subsistemas en los vehículos en tiempo real y notifica a la estación base cuando se detecta un fallo o situación potencialmente peligrosa (por ejemplo una colisión entre vehículos). En algunas situaciones, es además capaz de ejecutar un protocolo de neutralización para remediar el fallo, como detener uno de los vehículos y reanudar posteriormente su funcionamiento.
El sistema analiza toda la información proporcionada por los sensores y subsistemas en los vehículos en tiempo real y notifica a la estación base cuando se detecta un fallo o situación potencialmente peligrosa (por ejemplo una colisión entre vehículos). En algunas situaciones, es además capaz de ejecutar un protocolo de neutralización para remediar el fallo, como detener uno de los vehículos y reanudar posteriormente su funcionamiento.
El sistema se basa en una arquitectura distribuida y multinivel que divide la supervisión en diferentes subsistemas, lo que permite una mejor gestión de la detección y reparación de fallos. Todo ello demuestra que el concepto de flotas heterogéneas es viable y se encuentra en un estado pre-comercial.
A modo de recapitulación
En España disponemos de un gran número de equipos de investigación muy relevantes en relación al control automatizado de malas hierbas y plagas que han colaborado intensamente para demostrar la viabilidad de una variedad de soluciones de tratamientos herbicidas sobre cultivos cerealistas de invierno, y cultivos en línea de primavera; y de tratamientos fitosanitarios en cultivos arbóreos.
Los estudios indican que los sistemas automatizados son rentables medioambientalmente casi en cualquier ocasión, pero son económicamente viables para niveles de infestación entre un 5 y un 40%.
Cuando el nivel de infestación se sitúa entre el 5 y el 20%, se justifica el uso de cartografía aérea ya que puede ahorrarse bastante combustible al visitar tan sólo las áreas de cultivo afectadas.
En niveles de infestación del 20 al 40% se justifica económicamente el uso de sistemas de control en tiempo real.
Cada vez más la incorporación de nuevas bandas espectrales facilita la segregación de cultivos y malas hierbas, más allá de su localización entre líneas.
Los primeros ensayos en campo demuestran que los detalles son los que determinan en el éxito tanto desde el punto de vista del análisis de los sistemas de percepción (combinación de procesado lento 0,3 s y rápido 0,04 s), interferencia entre sensores, y tiempo de respuesta de los actuadores.
En el futuro no será suficiente hablar de malas hierbas sino que tendremos que trabajar a nivel específico conociendo y reconociendo factores fundamentales como las pervivencia del banco se semillas, el sistema de propagación y reproducción, así como sus hábitats preferenciales. La tecnología trabaja a favor del registro de detalles y de una actuación diferencial. n