Este trabajo estudia el potencial de la visión artificial y la robótica agrícola para desarrollar modelos predictivos de producción de uva y potencial enológico del viñedo de forma no destructiva, rápida, objetiva y fiable. La amplia variabilidad espacial y temporal en rendimiento (kg/ha) y potencial enológico de la uva requiere desarrollar métodos sistemáticos de predicción ante la subjetividad derivada de la inspección visual tradicional. La visión artificial aporta una tecnología con enorme potencial para automatizar procesos agrícolas, y su uso combinado con robótica agrícola permite crear poderosas herramientas capaces de obtener información clave sobre el estado de los cultivos, accesibles para el viticultor en forma de mapas de estado vegetativo del viñedo o predicción de cosecha.
J. Blasco (1), F. Rovira-Más (2), M. P. Diago (3), N. Aleixos (4), V. Sáiz-Rubio (2), S. Cubero (1), B. Millan (3) y J. Tardáguila (3).
1 Centro de Agroingeniería. Instituto Valenciano de Investigaciones Agrarias (IVIA). Moncada (Valencia).
2 Laboratorio de Robótica Agrícola. Dpto. de Ingeniería Rural y Agroalimentaria. Universitat Politècnica de València. Valencia.
3 Instituto de Ciencias de la Vid y del Vino (Universidad de La Rioja, CSIC, Gobierno de La Rioja). Logroño.
4 Instituto Interuniversitario de Investigación en Bioingeniería y Tecnología Orientada al Ser Humano. Universitat Politècnica de València. Valencia.
Una de las principales preocupaciones del sector vitivinícola a lo largo de la historia, y que continúa en la actualidad, es la estimación precisa y objetiva del rendimiento productivo del viñedo, así como de su potencial enológico. Esta necesidad se hace especialmente más crítica en la actualidad, donde no sólo el escenario mundial es enormemente competitivo y global, sino también debido al cambiante y poco predecible marco climático. En este sentido, la combinación de nuevas tecnologías aplicadas a la agricultura, como la visión artificial, la robótica agrícola o el geoposicionamento por satélite están penetrando con fuerza en este sector para reducir costes, manejo eficiente del cultivo, aumento de rendimiento y calidad de producto, y ya se está utilizando, por ejemplo, en viticultura de precisión (Blasco et al., 2014).
En general, una viticultura moderna y sostenible requiere una monitorización objetiva y continua del cultivo que permita una toma racional de decisiones, y eso sólo es posible investigando e introduciendo nuevas tecnologías y sensores especialmente adaptados al viñedo. Además, la creciente profesionalización del sector ha provocado un gran interés por aplicar nuevas tecnologías para el control y monitorización del viñedo (Tardáguila y Diago, 2008; Tardaguila et al., 2010). En este sentido, uno de los temas que más inquieta al sector vitivinícola es la estimación del rendimiento de uva del viñedo (Dunn y Martin, 2004), ya que se trata de un tema aún no resuelto y de gran importancia técnica y económica (Wolpert y Vilas, 1992; Clingeleffer, 2001).
Es importante destacar la relación entre producción de uva y calidad del vino, relación ampliamente asumida por los enólogos, así como el interés económico directo derivado de la producción de uva, ya que determina la oferta final de uva y de vino. Por tanto, conocer de forma anticipada y fiable la cosecha de uva tiene un gran interés para una bodega, un consejo regulador, o para la Administración.

Figura 1. Imagen original (izquierda) y segmentada (derecha) de una cepa de la variedad Tempranillo. En la imagen segmentada se distinguen las diferentes clases obtenidas por el algoritmo de segmentación (hoja verde, hoja senescente, madera, racimos y huecos).
En la mayoría de países europeos, la producción máxima de uva por hectárea está limitada y controlada en las denominaciones de origen. Además, estimar la producción de uva de forma temprana permite optimizar el manejo del viñedo, especialmente el aclareo de racimos que es una operación manual y bastante cara; en otras palabras, nos permitiría decidir de forma rigurosa si es necesario reducir o no la producción de uva del viñedo antes de la vendimia (Tardáguila et al., 2008). La estimación del rendimiento del viñedo también constituye una de las líneas de investigación con mayor proyección a nivel mundial, principalmente en países más avanzados donde ya comienzan a incorporarse las nuevas tecnologías de viticultura de precisión, como es el caso de EE.UU. o Australia (Proffitt et al., 2001).
Sin embargo, estimar el rendimiento del viñedo de forma fiable antes de la vendimia no es tarea fácil, ya que la producción varía anualmente y dentro de la parcela, dependiendo por tanto de numerosos factores difíciles de medir y controlar. En general, la producción de uva depende del clima, en especial de la precipitación, del suelo en cuanto a fertilidad y profundidad, del portainjerto y su vigor, de la fertilidad de las yemas según la variedad, de la poda que establece la carga de yemas y rango, de la fertilización según dosis y tipo de nutrientes aportados, de la dosis de riego y fase de aplicación, etc.
Para realizar una estimación fiable hay que tener en cuenta que no sólo varía la producción media del viñedo sino que también varían los llamados componentes de la producción, que tienen un gran interés práctico tanto desde el punto de vista cuantitativo como cualitativo (Dunn y Martin, 2003), siendo muy importante determinar el número de racimos por cepa (o metro lineal), el peso medio del racimo, el número de bayas por racimo y el peso medio de la baya. Desde el punto de vista de la mecanización, las propiedades fundamentales que caracterizan un viñedo son: la cantidad de uva recolectada, el azúcar en las bayas, su acidez y el estado vegetativo de las vides cuantificado a través del crecimiento de sarmientos durante el periodo vegetativo (Pellenc, 2010).
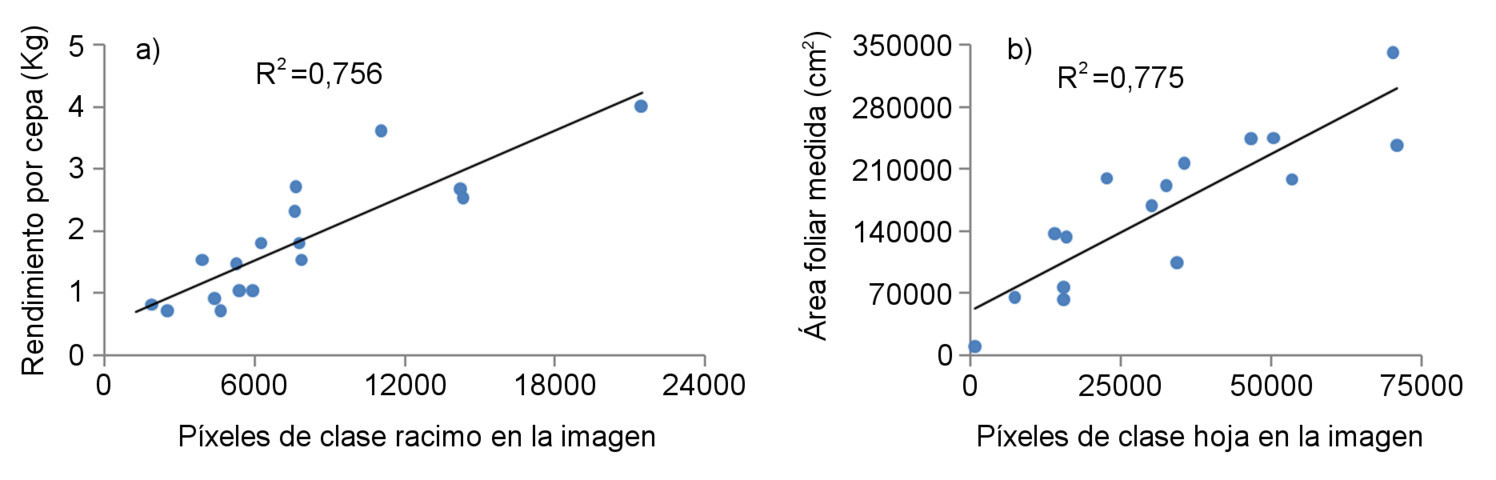
Figura 2. Correlaciones lineales encontradas para la estimación de a) producción de uva por cepa y b) área foliar.
Por otra parte, los usuarios en campo de estas tecnologías emergentes necesitan que los datos se presenten de forma clara, objetiva, y fácilmente interpretable. La estimación automática de parámetros de cultivo en tiempo real para confeccionar mapas de viticultura de precisión entraña varias dificultades operativas: por una parte, la complejidad de capturar imágenes de calidad ante condiciones de iluminación variables e impredecibles mediante sistemas de visión artificial (Cubero et al., 2011; Lorente et al., 2012); por otro lado, la necesidad de situar cada imagen en un marco de referencia común e inequívoco; y finalmente el reto de plasmar toda esta información en un formato claro y asequible a cualquier usuario inexperto en tecnologías de la información.
Estos retos han sido la causa de un bajo nivel de adopción de las nuevas tecnologías si tenemos en cuenta la gran expectación suscitada en los años noventa (Pölling et al., 2010), pero la acción combinada de un aumento en la velocidad de procesado con la reducción de precios en componentes electrónicos sin duda va a proporcionar un fuerte impulso a estas tecnologías avanzadas.
Análisis de las características de la cepa
El estudio de las características de las cepas se realizó en 2012 en cuatro viñedos distintos de la variedad Tempranillo (Vitis vinífera L.) localizados en la DO Utiel-Requena (Valencia). Las cepas del viñedo experimental estaban conducidas en espaldera de doble cordón (VSP) y se podaron a 10-12 nudos. El viñedo no se regó durante la época de crecimiento y las cepas se deshojaron una vez al final de junio (estado fenológico de tamaño guisante). Se marcaron diez cepas de cada viñedo antes de la adquisición de las imágenes.
Para el estudio, se tomaron imágenes de cada una de las cepas marcadas en el momento de la vendimia. Las imágenes se tomaron entre las 9 y las 11 de la mañana situando la cámara (EOS 550D, Canon Inc., Japón) usando un trípode a una altura de 70 cm sobre el suelo y desde una distancia de 2 metros de la cepa. Se colocó una pantalla de color blanco en la parte posterior de cada cepa para evitar la influencia negativa de la vegetación de fondo sobre el algoritmo de segmentación. La segmentación es el proceso que consiste en la clasificación de los distintos píxeles de la imagen en regiones de interés que, en este caso, correspondían a hojas verdes, hojas senescentes, madera, racimos y huecos en la vegetación (porosidad de la vegetación). Se programó un algoritmo de segmentación basado en la distancia de Mahalanobis (Tardáguila et al., 2011) cuyo resultado era el número total de píxeles de cada clase y el número de regiones conectadas de cada clase (figura 1).
A partir de estos datos se obtuvo el área foliar por cepa y el rendimiento estimado a través de la exposición de racimos de cada vid siguiendo los trabajos de Dunn y Martín (2004), y Tardáguila et al (2010).
Tras la toma de cada imagen, cada cepa fue manualmente deshojada en su totalidad y se mantuvieron separadamente todas las hojas principales y secundarias provenientes de los nietos. Posteriormente se determinó la superficie foliar principal, secundaria y total de cada cepa en el laboratorio mediante un medidor de área foliar (LI-3100C, Li-Cor, EE.UU.). Adicionalmente, los racimos de cada una de las cepas analizadas se pesaron para obtener su peso individual así como la producción de uva por cepa.
La figura 2 muestra las correlaciones encontradas para la estimación del área foliar (hojas verdes) y el rendimiento (racimos) entre los sistemas manual y automático. Las relaciones encontradas entre ambos métodos permiten confirmar que la estimación de estos factores, que tienen una elevada importancia en el desarrollo de las cepas, se puede realizar y monitorizar de forma fiable usando un sistema sencillo, económico y rápido de visión por computador.
Cuantificación de la variabilidad espacial del vigor
Con el propósito de construir mapas que registraran la variabilidad espacial del vigor vegetativo de un viñedo se ensambló un sistema de visión artificial sobre el tractor convencional de la foto 1a (John Deere 5820, Deere & Co, Moline, Il, EE.UU.), realizando múltiples sesiones de adquisición de datos sobre diez filas seleccionadas del viñedo de la foto 1b entre los años 2010 y 2012. La parcela está ubicada en Requena (Valencia), presenta una pendiente del 3%, y contiene cepas Cabernet-Sauvignon de 20 años de edad plantadas en espalderas separadas 3 m.

Foto 1a. Sistema de adquisición sobre vehículo convencional
El posicionamiento global del vehículo, y por tanto del sensor de visión artificial, se obtuvo procesando mensajes NMEA (Rovira-Más y Banerjee, 2013) capturados por un receptor GPS (StarFire iTC, Deere & Co, Il, EE.UU.) montado en la cabina del tractor, quedando la antena situada a 3 m de altura y siendo la frecuencia de trabajo de 5 Hz. Las imágenes del viñedo fueron adquiridas con una cámara monocroma en disposición cenital (JAI CM-140GE-UV, Copenhague, Dinamarca), a la que se le acopló un filtro infrarrojo centrado en 800 nm y de rango espectral 780–820 nm (Edmund Optics, Barrington, N.J., EE.UU.).

Foto 1b. Entorno monitorizado
El tractor recorrió las calles del viñedo a una velocidad moderada entre 4 y 6 km/h, capturando imágenes cenitales de las plantas con un tamaño de 696 x 520 píxeles. Se aplicó un algoritmo específicamente desarrollado para esta aplicación (Sáiz-Rubio y Rovira-Más, 2012) a cada imagen con el objetivo de aislar la vegetación sana del resto de elementos capturados en las imágenes, como el suelo, partes del vehículo, los alambres de la espaldera, o los pilares que los sustentan. El algoritmo cuantificó y registró de manera automatizada la variación de vegetación presente en las imágenes como porcentaje de anchura de pared vegetativa.
La figura 3 ilustra este proceso para tres situaciones: bajo vigor del 32% (a), vegetación media del 44% (b), y vigor alto con índices del 73% (c). El resultado del algoritmo de segmentación puede apreciarse al comparar la fila superior (imágenes originales) con la fila inferior (imágenes segmentadas), donde los elementos descartados han sido convertidos a color negro pero la vegetación mantiene su nivel de gris original.
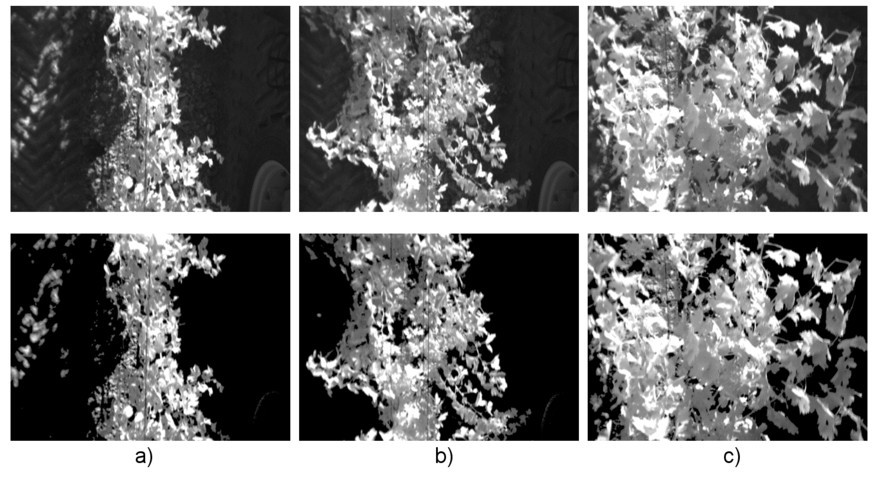
Figura 3. Índice relativo (cenital) de anchura de pared vegetativa: (a) 32%; (b) 44%; y (c) 73%.
El conjunto de imágenes (figura 3) capturadas en el campo y almacenadas en el ordenador de a bordo no aportan ningún dato de interés a no ser que se disponga de su posición exacta en la parcela. La incorporación de un receptor GPS en el vehículo de muestreo no garantiza la inmediata generación de un mapa de cultivo apropiado, ya que las coordenadas geodésicas habituales son poco intuitivas para los usuarios, utilizan un centro de coordenadas ambiguo, y requieren el uso de geometría esférica, lo que las hace muy ineficientes para aplicaciones prácticas de campo. El sistema de coordenadas del plano tangente local, por el contrario, permite la selección de un origen de coordenadas en la propia parcela (diseño centrado en el usuario), emplea las coordenadas intuitivas este y norte, y admite geometría euclídea para el cálculo de distancias y superficies (Rovira-Más et al., 2010).
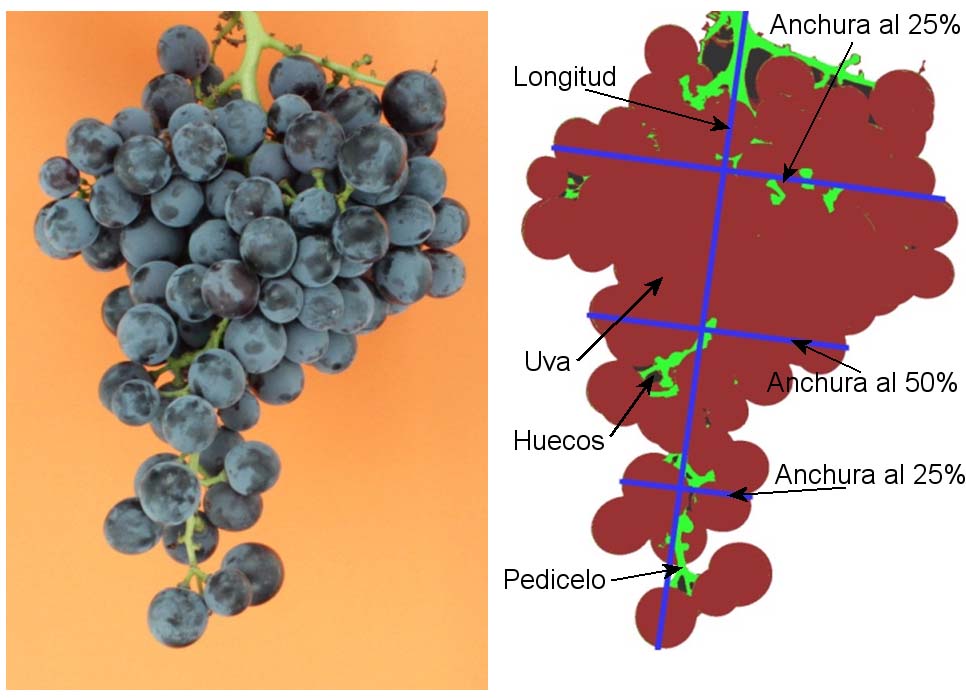
Figura 4. Variabilidad espacial de la vegetación de un viñedo con visión artificial
Cuando todos los porcentajes de vegetación, estimados a partir de imágenes como las de la figura 3, se plasmaron en un mapa configurado según el plano tangente local y sintetizado según una malla de celdas uniforme (Rovira-Más, 2012), se obtuvo el mapa de vigor cenital representado en la figura 4. Nótese la variabilidad en vigor a lo largo del eje este-oeste, provocada por la acumulación de agua en el extremo más hondo de la parcela situado en el margen este. La estandarización de los mapas de cultivo permite su correlación con otras variables de elevado interés para el productor como el rendimiento y la calidad del futuro vino, aportando además una herramienta con carácter predictivo que en términos generales podemos denominar la biometría del viñedo (Rovira-Más y Sáiz-Rubio, 2013).
Conclusiones
Los resultados obtenidos han demostrado que los sistemas basados en visión artificial son potentes herramientas capaces de automatizar con precisión diferentes tareas de inspección en viticultura. Estas técnicas han permitido realizar estimaciones generales de la variación de vigor vegetativo a lo largo del viñedo, así como algunas características de la cepa, como el área foliar o la exposición de racimos directamente en el campo de una manera rápida y efectiva.
La tecnología estudiada presenta un enorme potencial para su aplicación en viticultura tanto en el viñedo como en laboratorio, incluyendo la posible predicción de cosecha, el estado vegetativo de la planta o la estimación de componentes relacionados con la calidad de la uva y del vino.
No obstante, todavía queda mucho camino por recorrer en esta línea de investigación pero ya se está trabajando en la creación de sensores basados en visión artificial que se puedan incorporar a pequeños vehículos agrícolas para adquirir datos del viñedo, y obtener datos sobre su estado vegetativo, el rendimiento previsto e incluso algunos parámetros relacionados con la calidad final del vino a partir del análisis de los racimos expuestos.
Agradecimientos
Este trabajo está parcialmente financiado por el Instituto Nacional de Investigación y Tecnología Agraria y Alimentaria (INIA) a través de los proyectos RTA2012-00062-C04-01 y RTA2012-00062-C04-03.