Investigadores de la Universidad Politécnica de Madrid (UPM) han desarrollado un nuevo método que permite identificar y caracterizar vegetales dentro de cultivos en hileras para llevar a cabo procesos de fertilización orgánica utilizando una plataforma robotizada equipada con sensores (cámaras y láser) y un brazo robótico.
Los diferentes componentes del método implementado permiten actuar con cada planta, a nivel individual y considerando tamaños específicos, para dosificar fertilizante orgánico líquido.
El método propuesto está basado en una red neuronal entrenada que ha demostrado tener una precisión de más del 90%, y porcentajes de error inferiores a 3%, para reconocer especies vegetales.
El equipo de investigadores que ha llevado a cabo el trabajo está integrado por el grupo de Robótica y Cibernética (ROBCIB), del Centro de Automática y Robótica (CAR CSIC-UPM), y el grupo de investigación LPF-TAGRALIA de la ETSIAAB-UPM.
El desarrollo llevado a cabo por el equipo forma parte del proyecto SureVeg (Strip-cropping and recycling of waste for biodiverse and resoURce-Efficient intensive VEGetable production) que busca implementar soluciones tecnológicas para mejorar los procesos de cultivo en hileras.
El principal objetivo del trabajo llevado a cabo se ha centrado en analizar las necesidades específicas de cada vegetal a nivel de planta individual, para la toma de decisiones sobre la aplicación de tratamientos con fertilizantes líquidos. Para ello se ha implementado un nuevo método basado en redes neuronales convolucionales, que toma las imágenes capturadas a partir de una cámara a bordo de la plataforma e identifica el tipo de vegetal, su localización dentro de la hilera de cultivo y sus dimensiones.
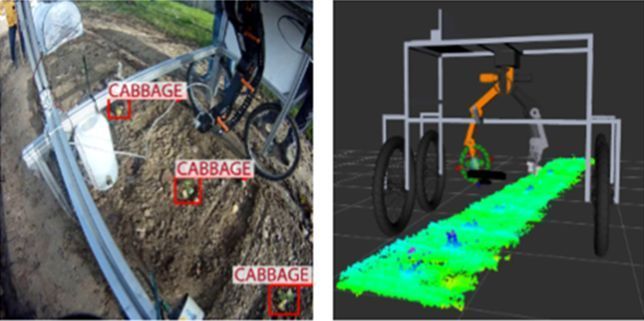
Identificación de vegetales (plantas de repollo) en las hileras de cultivo y generación de movimientos del robot. Fuente: “Robotic Fertilization in Strip Cropping using a CNN Vegetables Detection-Characterization Method”. Computers and Electronics in Agriculture.
El análisis de necesidades vegetativas para determinar qué planta requiere de fertilizante, consiste en cuantificar el parámetro NDVI (índice de vegetación de diferencia normalizada) obtenido a través de imágenes multiespectrales. Este tipo de imágenes captan rangos de longitud de onda imperceptibles para el ojo humano, pero que aportan información valiosa para este tipo de aplicaciones.
Una vez procesada la información sensorial, el resultado es el vegetal identificado y sus dimensiones, así como también la indicación de si se debe o no aplicar el fertilizante. Esta información es enviada a los sistemas de planificación de movimientos del robot para la generación de trayectorias libres de colisión.
“El método implementado ha demostrado una alta eficacia en la detección de vegetales”, han explicado los investigadores. Los resultados obtenidos muestran que la red neuronal entrenada e implementada tiene una precisión del 90,5% y bajos porcentajes de error (por debajo de 3%) durante la caracterización de vegetales.
“Además, hemos podido demostrar que la aplicabilidad de este tipo de tecnologías tiene un gran potencial dentro del campo de la agricultura de precisión”, han apuntado los autores del trabajo.
Christyan Cruz Ulloa; Anne Krus; Antonio Barrientos; Jaime del Cerro; Constantino Valero. Robotic Fertilization in Strip Cropping using a CNN Vegetables Detection-Characterization Method. Computers and Electronics in Agriculture. Volume 193, February 2022, 106684. https://doi.org/10.1016/j.compag.2022.106684
FOTO portada* La plataforma robótica desarrollada entrenando en uno de los campos de prácticas de la ETSIAAB-UPM. Fuente: “Robotic Fertilization in Strip Cropping using a CNN Vegetables Detection-Characterization Method”. Computers and Electronics in Agriculture.